适用于: SDK v4
若要成功地测试和调试机器人,其中的一个关键是必须能够记录并检查运行机器人时出现的一组条件。 本文讨论如何创建并使用一个机器人脚本文件,目的是提供一组详细的适用于测试和调试的用户交互和机器人响应。
机器人脚本文件
机器人脚本文件是一个专用的 JSON 文件,保留了用户和机器人之间的交互。 脚本文件不仅保留了消息内容,还保留了交互详细信息,如用户 ID、通道 ID、通道类型、通道功能、交互时间等。 上述所有信息均可用于查找和解决测试或调试机器人时出现的问题。
创建/存储机器人脚本文件
本文介绍如何使用 Bot Framework Emulator 来创建机器人脚本文件。 也可以通过编程来创建脚本文件;有关该方法的详细信息,请参阅 Blob 脚本存储。 在本文中,我们将使用多回合提示机器人 的 Bot Framework 示例代码来请求用户的交通方式、姓名和年龄,但任何可以使用 Microsoft 的 Bot Framework Emulator 访问的代码都可以用来创建脚本文件。
要开始此过程,请确保要测试的机器人代码正在开发环境中运行。
启动 Emulator。
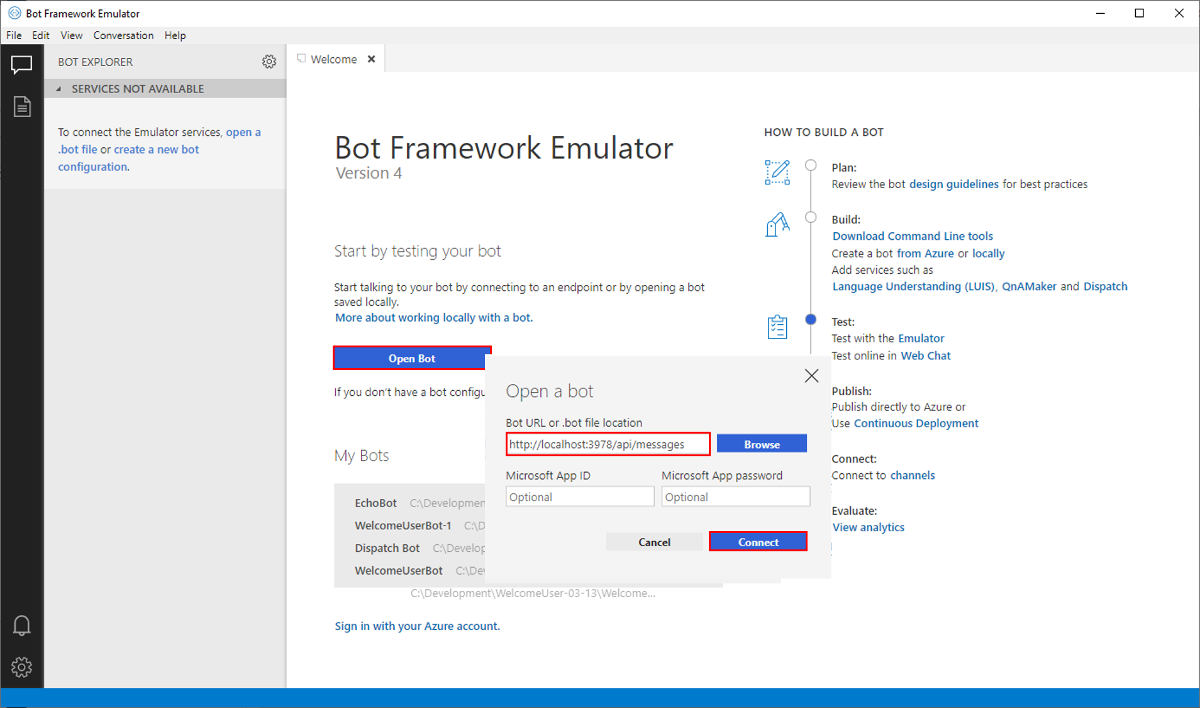
在“欢迎”选项卡上,选择“打开机器人”。
输入机器人正在侦听的端口地址,后面跟
/api/messages,例如http://localhost:3978/api/messages。如果你的机器人配置了 Microsoft 应用 ID 和密码,请在“打开机器人”对话框中输入 ID 和密码。 否则,模拟器将无法连接到机器人。
选择“连接”将模拟器连接到机器人。
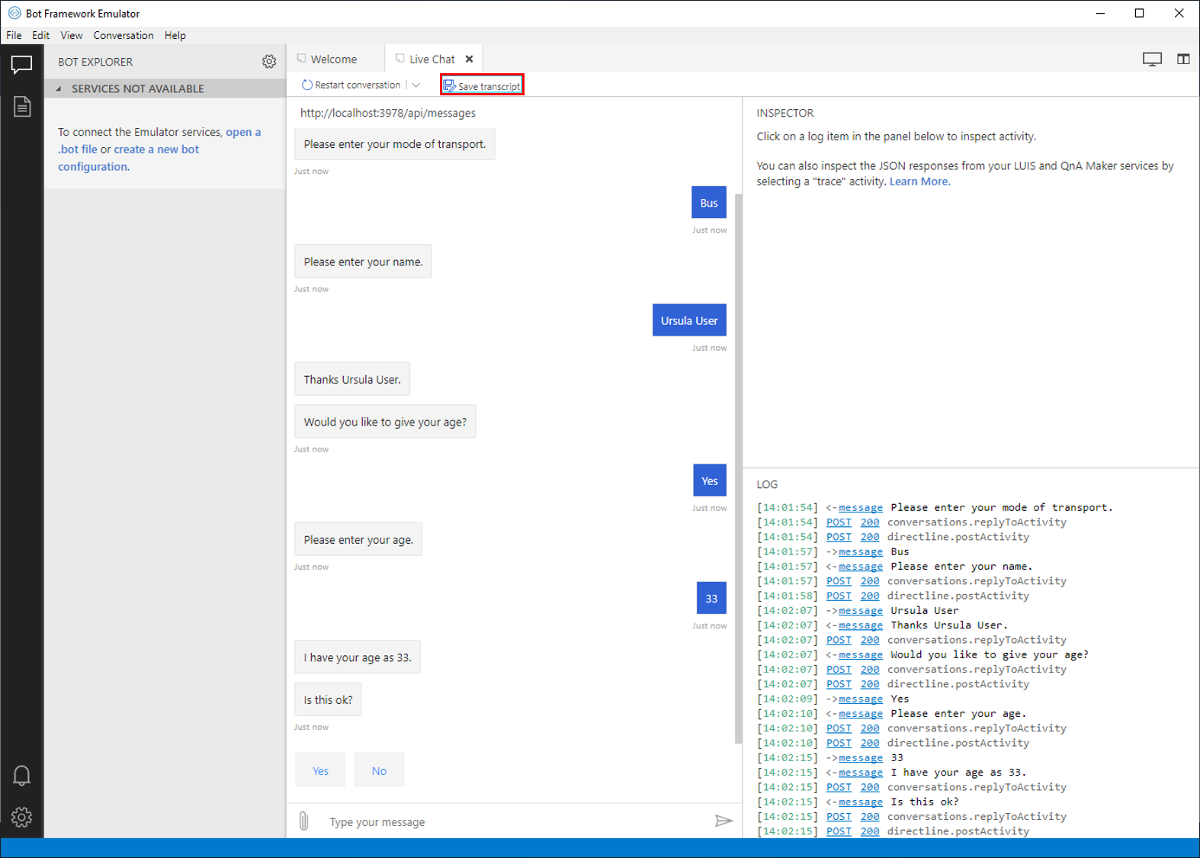
在模拟器中与机器人互动,以便测试代码。 在输入要保留的所有用户交互后,使用 Bot Framework Emulator 创建并保存包含对话内容的脚本文件。
在“实时聊天”选项卡中,选择“保存脚本”。
选择脚本文件的位置和名称,然后选择“保存”。
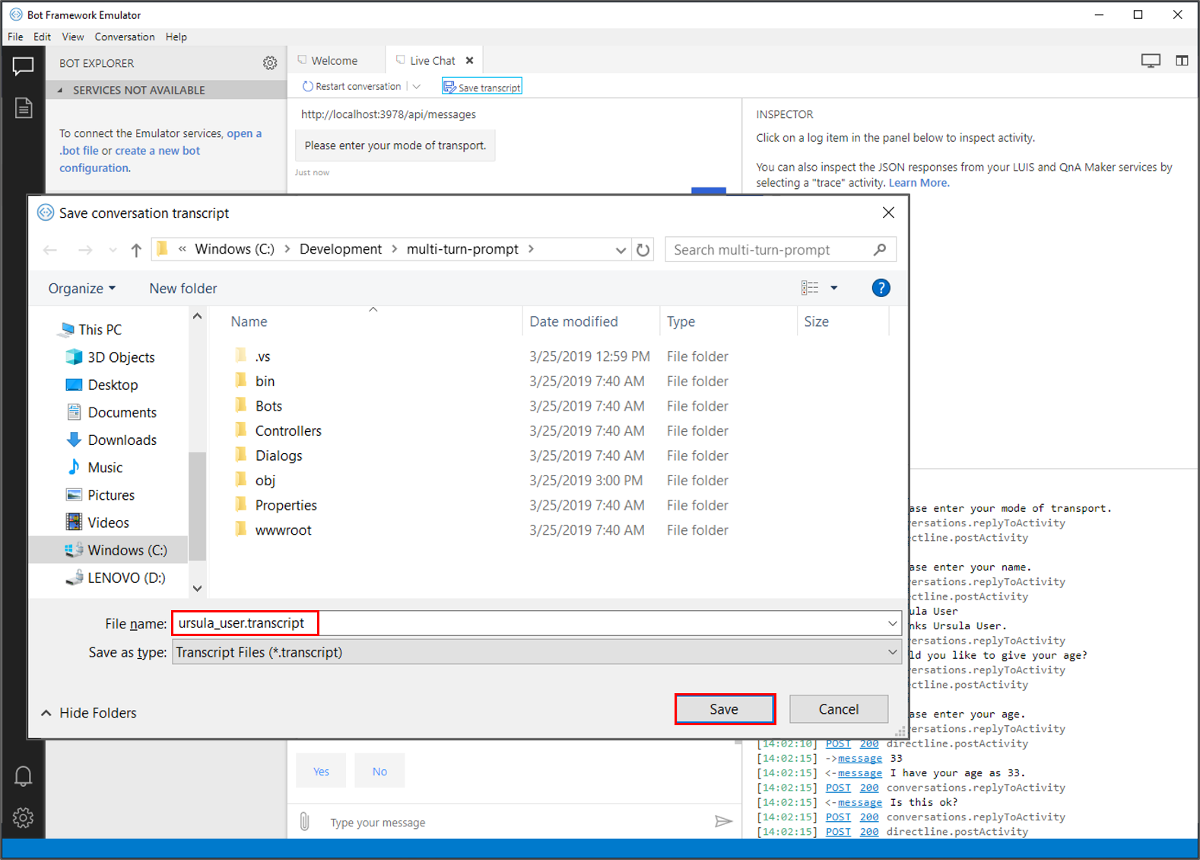
在使用模拟器测试代码时输入的所有用户交互和机器人响应,现在都已保存到脚本文件中,之后可以重新加载,以帮助调试用户和机器人之间的交互。
检索机器人脚本文件
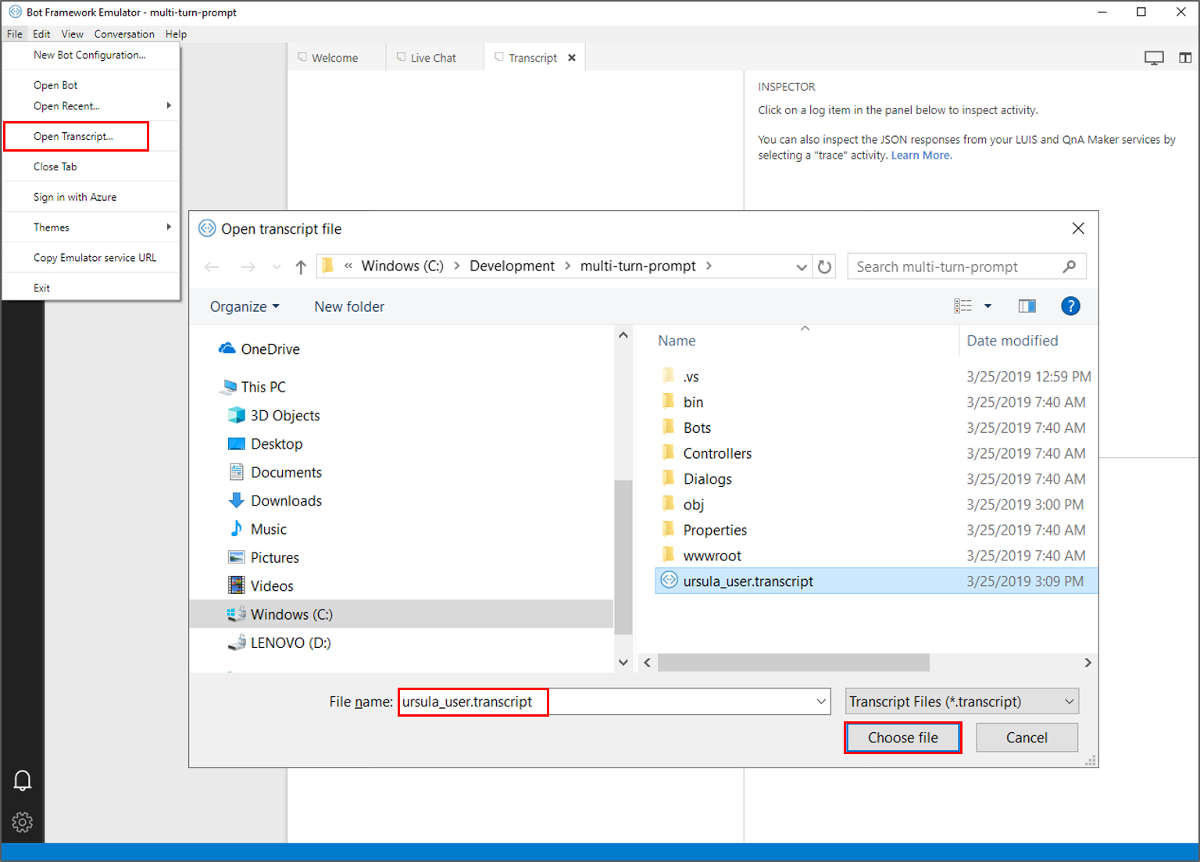
打开脚本文件时,模拟器会将保存的对话载入新的标签页。
检索机器人脚本文件:
- 打开模拟器。
- 从菜单中选择“文件”,然后选择“打开脚本”。
- 使用“打开脚本文件”来选择并打开要检索的脚本文件。
使用脚本文件进行调试
加载了脚本文件后,你就可以调试捕获的用户与机器人之间的交互了。
选择模拟器的日志窗格中记录的任何用户或机器人消息或活动。
模拟器将在检查器窗格中显示活动信息。 活动信息是活动 HTTP 请求的有效负载。
消息活动包括:
- 活动类型
- 通道发送或接收活动的时间
- 有关用户通道的信息
- 关于活动发送方和接收方的信息,分别显示在
from和recipient字段中 - 活动类型的特定信息,如消息活动的消息文本。
这种详细程度的信息可以让你跟踪用户输入和机器人响应之间的逐步交互,这对于调试机器人没有按照预期的方式响应或根本没有响应用户的情况非常有用。 有了这些值和导致交互失败的步骤记录,就可以逐步查看代码,找到机器人未按预期响应的位置,然后解决相关问题。
可以通过许多方式来测试和调试机器人的代码和用户交互,将脚本文件和 Bot Framework Emulator 配合使用的方式只是其中的一种。
其他信息
有关测试和调试的详细信息,请参阅:
- 机器人测试和调试指南
- 使用 Bot Framework Emulator 调试
- 排查常见问题和该部分中的其他疑难解答文章。
- 在 Visual Studio 中进行调试